NEOMOSAIC
implementation of the project entitled robotic glass mosaic cladding production and VEKOP-2.1.7-15-2016-00559
Name of beneficiary: TNDR Service Kft.
Project title: NEOMOSAIC robotizált üvegmozaik burkolat előállítás
Amount of contracted aid: 34 333 479,-Ft
Extent of support: 65,2 %
Date of the physical completion of the project: 2021.06.30.
Start of project: 2019.07.01.
Total cost: 52 660 585,-Ft
Project ID number: VEKOP-2.1.7-15-2016-00559
Project progress
June 2021
Brief description of the project
The technical content of the project is a CNC router-based cutting machine and a robotic arm system that organizes the finished and specimens based on a predefined pattern. In addition to cutting, the cutting device is also capable of engraving and surface milling. The equipment can process the following materials: plastic, plexiglass, glass, ceramic, tile, tile, stone, wood. Compared to previous plans, this significantly expands the range of materials that can be processed and satisfies customer needs much better, as not only tile-based mosaics can be made, but also the possibility of combining materials. By engraving stone, patterns can also be made that were previously only available with stone-effect wallpaper or by a stone carver. Many materials have unprecedented combinations. Through the milling process, for example, it is possible to make a mosaic in which tiles or pieces of glass are etched into a wooden base. Due to the different properties of the materials, not all raw materials are suitable for cutting. Plastic, plexiglass, glass can be cut indefinitely in typical thicknesses, while in the case of ceramics, tiles, tiles and wood, the material thickness and material structure must already be taken into account. This is important because it is also possible to process the material brought by the customer with the equipment, which is a significant customer acquisition factor. The laser equipment is not capable of cutting stone. Any of the above materials can be engraved or milled. Compared to the classic 10x10 mm tile pieces, this results in a much more varied end product, as there is a wider choice of raw materials that can be combined with each other and not only squares can be cut, but mosaic pieces of any shape or curve can form the final mosaic. Not only can the pattern be provided by the different coloring of each element than in the case of a classic mosaic, but surface milling can actually shape three-dimensional objects. The finished mosaic will be much more lifelike or special.
The following processes can be implemented with the equipment: cutting, milling, unloading, design. Cutting, milling and unloading are also possible from the material on site and brought by the customer. Software design is a very important part of the process because it provides instructions to both the cutting equipment and the robotic arms responsible for unloading. Mosaics can be designed based on a sample image, from pre-made templates, or using a random pattern. When designing based on a sample image, the customer provides the image from which you want to make a mosaic. The whole process is completely personalized, because you can choose not only the image, but also the raw materials to be used, their colors and shades. If you want to machine your own material, you can specify the color codes of the materials in the design process so that you can see realistic designs. Previously, we would have used the Floyd-Steinberg algorithm as part of the noise modulation procedure, which breaks the image into small squares. Now, in addition to the Floyd-Steinberg algorithm, threshold coloring is also part of the basic noise modulation. In addition, based on individual needs, the customer can choose a completely unique noise modulation algorithm. This extra feature guarantees that the end result can be different for two completely identical basic images and raw materials. One such algorithm to choose from is random sampling or different fault diffusion algorithms such as Burkes or Sierra. . Customers who do not want to provide a sample image can also use custom pre-fabricated patterns. They can make the mosaic unique by choosing the raw materials and colors. It is also possible to create completely random, modern, non-figurative patterned mosaics.
The whole process consists of the following steps: selection of raw material, design, cutting and / or milling, unloading, packaging, transport, application. In the case of packaging, it is important to point out that due to the unique patterned shapes, the previous storage compartment solution cannot be used in all cases. If it is not a small size of regular tiles, the elements can be glued to a transport material, depending on the type of raw material used. In the case of very complex or non-adhesive elements, we number the elements and take a photo, on the basis of which the entire mosaic can be reassembled at the destination. Of course, if the customer wants to unload the tile image himself, the system is able to cut the appropriate pieces and compile them into groups by color, not by shape. The underlying technology can operate without human intervention, but human intervention in the process may be required for individual customer needs.
Contrary to previous plans, the system consists of two main components, a CNC router with a laser cutter and a moving unit with robotic arms. The system built in this way, as can be seen from the above, is now not only able to place fixed-sized and square-shaped tile and glass mosaics from the supplier, but we can also carry out the cutting on site, which results in a variety of materials and also for cutting non-square pieces of material. The combined use of several robotic arms also gives you more freedom to move. The cutting technology is laser-based, which allows the tile to be cut in an environmentally friendly way without contaminating the air with debris. The advantage of the laser, in addition to the special cutting curves mentioned earlier, is that its cutting surface is much narrower than that of drill bit or cutting disc-based solutions, which allows it to perform much finer and less wasteful cutting jobs. An additional advantage of the laser is that it is not necessary to check the sharpness of the cutting surface, because the laser head does not wear out during the operating cycle. Laser cutting requires much less cooling water, which also points in the direction of reducing the environmental impact. The use of robotic arms eliminates the need to move the tiles by hand, so sharp surfaces cannot cut people or greasy dirt on human skin is deposited on the tile, making it easier to cut and shine brightly depending on the material. An additional advantage of the robotic arm is that there is no need for rest periods used in the human workforce. A low robot arm can do work even in a small space that a person cannot fit in, so it moves different workpieces much more efficiently within its own parameters. In addition to cutting, the equipment can also be used for milling surfaces, so quite special and unique solutions can be created, the combinations are limited only by imagination. Laser technology is cleaner and quieter than traditional cutting head solutions, so the equipment can be used not only in industrial halls.
Given that the development to be implemented is modular, the number of subsequent development opportunities will expand significantly, and in the longer term it is possible not only to sell the product manufactured by the device to be built within the project, but also to consider the technology itself, sell the software operating the system and the list of properties of the technical peripherals to be used to small businesses, as it is a system that provides an essential tool for balancing activities in the field of construction and art, so it may be an indispensable tool for it inspires anyone else to be creative.
In summary, the equipment can be used to create custom-shaped mosaic pieces that can be assembled as an image and thus used to form tiles. The innovation and special feature of the solution compared to the traditional tile and glass mosaic solutions is that the elements do not necessarily have to be square or of the same size or the same material, so much more spectacular and creative images and coverings can be created.
Presentation of progress
In the initial phase of the project, the software side of the tile cutting system was designed.
This includes the need for interoperable robot arm control software, which are:
- low level driver: software for direct movement of robot arms
- mid-level modules: modules that coordinate the work of individual robot arms
- high level program: a system for coordinating the placement of tiles
Tile cutting equipment software requirements:
- low level driver: direct control of the cutting head
- high level driver: resolution of the image provided by the customer into image elements that can be processed by the computer and cut out by the cutting head
Other programs, such as server services, tiling algorithm
At the same time, the process of testing the final computer hardware began, consisting of a load test and a durability test, respectively. The load test meant performing continuous calculations. The durability test consisted of disassembling and assembling the hardware components several times and testing them under various working conditions (cold, hot, dry air, steam, dusty environment). Testing was necessary because, although laser cutting technology causes relatively little contamination on operating hardware, the heat impact of high stress, rapid cooling can reduce machine performance. During the testing, protocols were developed to intervene in the cooling of the machines based on the appropriate environmental data. For example, with a multi-circuit ventilation system, the temperature of the machines can be maintained in an energy-efficient manner, even at high outside temperatures and high loads.
The second phase of progress
The second phase of the project is testing and experimentation.
The testing phase consists of the following elements:
- software testing
- mosaic maker software testing
- testing software for moving arm robots
- testing the software that controls the progress of the cutout
- testing the system for placing tiles
- hardware testing
- calculating and testing the load capacity of robotic arms
- vacuum system leak tolerance testing
- load testing of the cutting equipment in the light of temperature
- testing the cutting speed and cutting strength of different materials
Most of the elements of the testing phase were successfully completed at first. The basic algorithms of the tile-making software tested well even in the case of complex images, and the stylistic features of that basic pattern could be extracted from the finished pattern. The testing of the robot arm control software was also successful, the device is able to receive all the required frequency ranges and is able to perform the necessary movements. During testing, it was found that in the case of large-scale use, small inaccuracies in motion add up, and in the long run there may be a significant difference between the calculated and actual position of the software. During testing, any deviation greater than 3mm is significant. This figure is based on the hardware load, because the vacuum and the suction head of the robotic arm can hold a heavier tile or a larger metal plate, but if the gripping point is not formed above the center of gravity, it is caused by mechanical noise (wind) in the environment. the overload already causes an extra load on the vacuum head, which can easily fall out of place. For all such projects, safety of life, body and operation comes first, so the 5mm margin of error has been reduced to 3mm. The necessary correction is performed by simple machine vision algorithms. That extra task does not cause a significant reduction in system performance because the processor time required for the calculation is usually available. In extreme heat, when the control processors are operating at a lower load for safety reasons, there is only a 5-10% reduction in performance when the system is running at full capacity. This can be remedied later by ventilation, installation of extra fans and the installation of extra heat sinks. Testing of the software for the cutting process and the placement of the tiles was also successful, but it is still a task to load the material to be cut under the cutting head with precision operations. With more precise positioning, the cutting tray should not be raised or lowered to achieve a significant increase in performance. A complex sequence of movements usually requires 6 to 13 seconds of tray movement, which would increase the cutting useful time per workpiece. This could result in either a slower cutting speed or more cut workpieces. The former would also allow the use of other, more difficult-to-cut materials, while the latter would have a profit-increasing effect.
One of the most difficult and longest-lasting stages of harrowing testing is to determine the (1) force, (2) speed, and (3) the number of repetitions of the different materials. These values differ not only from material type to material type, but also depending on the pattern you want to create. In a sense, this stage also occurs regularly during operation, because it is very important to determine the optimal values when using a new material. These numbers fundamentally and directly affect two things. On the one hand, the cutting time and, on the other hand, the amount of energy required for cutting. Both have an impact on productivity. If the cutting work can be accelerated at a speed of 1 mm / sec, this provides an additional cut of 3600 mm measured in operating hours. The size of a small tile is 100 x 100 mm, which means that 9 tiles per hour could be cut out of a tile with a circumference of 400 mm with such a small increase in performance. Therefore, this phase of testing will continue after the project is completed.
In the current tests in June 2021, we are experimenting with what materials and what cutting and surface milling techniques can be combined to create a much nicer end product.
Results of the project
The NEOMOSAIC Cinema Production System was created, which consists of the following main elements:
- laser cutter
- robotic arms
- vacuum system
- control system
As this was a development project, the design of the project was followed by the creation of a new type of tool, which could provide aesthetic and innovative solutions for the construction and art industries, from the various components supplied and through the innovation of the developers.
The project included construction, assembly, development, programming and testing phases. During the construction phase, the various holding devices and controls were built. The assembly phase involved assembling the equipment, which arrived in several pieces. In the programming phase, both low-level and medium- to high-level interfaces and control programs were created. As development, the realisation of own ideas is highlighted, such as the development of a system with individual relay control or network communication procedures in the control software. During testing, we tried out the recommendations in the factory documentation for the devices in question, experimenting with our own procedures best suited to the specific situation. Here, it is worth mentioning, for example, the knowledge of what size mosaics can be cut from different materials without static damage to the working material, or, for example, what level of operating load results in what system thermal rises. The latter is also important because once critical temperatures are reached, system components can easily be damaged. During the testing, the control computers were also subjected to several weeks of load testing, during which they had to perform repetitive calculations. These included both simple and more complex calculations using the SHA256 encryption key. The tests also included progressive load tests that were more demanding than could be achieved under operating conditions. For example, during the load test of the robotic arms, the arms had to lift increasing amounts of mass.
The system is able to perform cutting and milling operations on workpieces. Tests were carried out on the following materials:
- Plastic
- Plexiglas
- Glass
- Ceramic
- Ceramic tiles
- Tiles
- Stone
- Wood
- Paper
The success of the works depended essentially on the quality and thickness of the material used and the parameters of the system. In our experience, it was necessary to calibrate the system for a completely new material composition. Calibration was necessary to determine the cutting speed, cutting force and possible number of repetitions best suited to the material.
The whole process consisted of the following steps: selection of the raw material, design, cutting and/or milling, unloading, packaging, transport, loading.
Given the modular nature of the development to be carried out, the number of possibilities for further development will be significantly increased and, in the longer term, it is worth considering not only the sale of the product manufactured by the tool to be built under the project, but also the technology itself, the software that runs the system, and the list of features of the technical peripherals to be used, since it is a system that provides a basic tool for activities that are on the borderline between the construction industry and the arts, and therefore, although it is primarily an indispensable tool for those working in the field of tiling technology and applied artists, the developments made can also inspire innovation in anyone else.
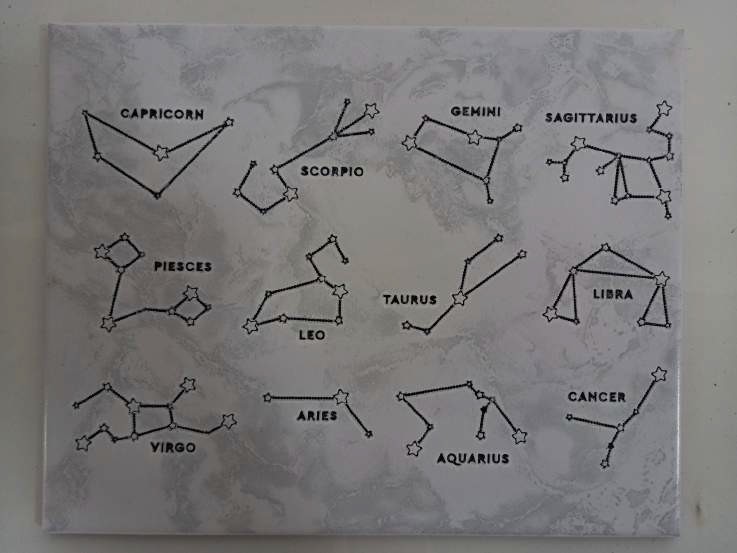
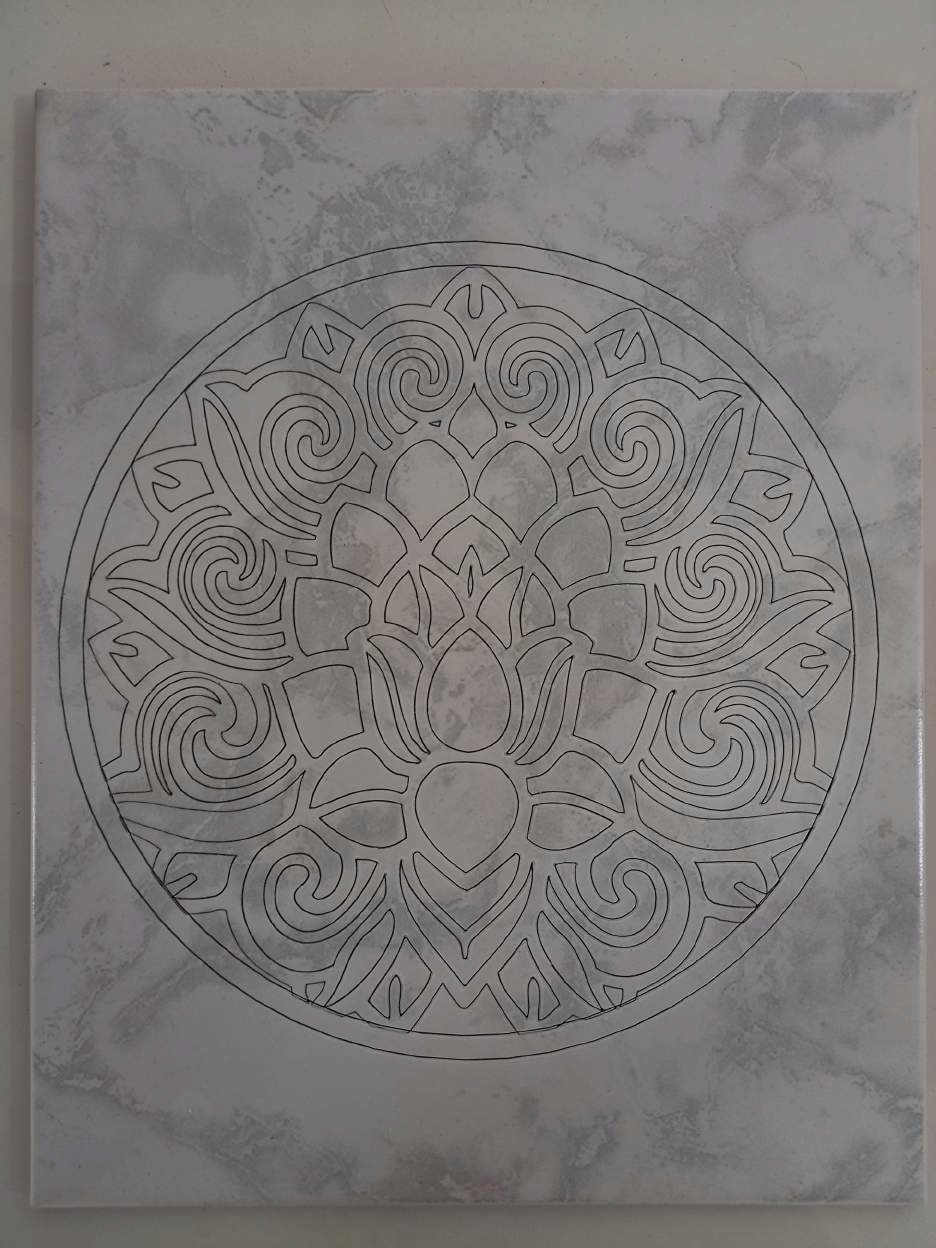
The mosaics produced during testing :